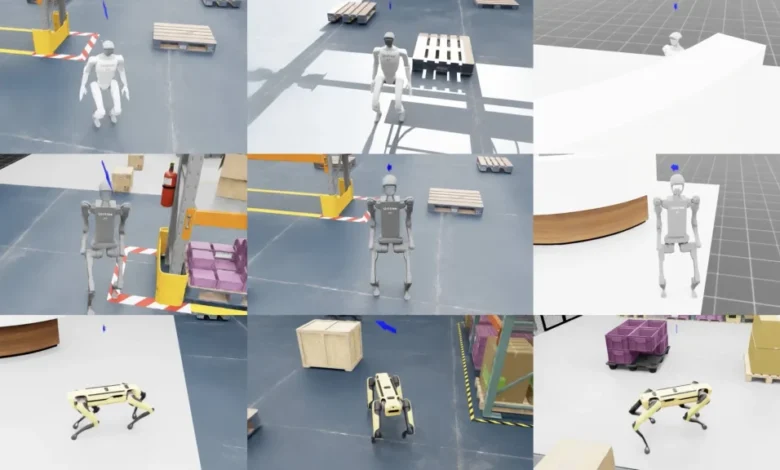
Recent advancements in robotics are ushering in a transformative phase, moving from scripted automation to adaptable and reliable systems operating in unpredictable environments. At the International Conference on Robotics and Automation (ICRA), NVIDIA Research showcased eight out of 28 accepted papers that highlight the significance of sim-to-real transfer in this evolution. These papers address various challenges in robotics, including planning, perception, and action execution.
NVIDIA Breakthrough: Advancing Robotics from Simulation to Reality
NVIDIA’s research demonstrates how robots can generalize their skills and operate autonomously in real-world settings. The highlighted papers focus on topics such as:
- Multi-arm coordination and scheduling
- Navigation across different robot designs
- Grasping in cluttered environments
- Precise assembly techniques
- Integration of vision and language models
Enhanced Coordination with ScheduleStream
ScheduleStream represents a significant leap in robot coordination. This system enables multiple robotic arms to plan and execute tasks simultaneously rather than sequentially. By utilizing GPU computations, ScheduleStream achieves a threefold increase in efficiency across multi-arm scenarios, particularly on the NVIDIA Jetson edge AI platform.
COMPASS: Improving Navigation Across Diverse Robots
Navigating successfully is critical for robots, but each robot design complicates the transfer of navigation software. The COMPASS framework addresses this by employing imitation learning and reinforcement learning, allowing different robot shapes to share a navigation policy. COMPASS has shown a 4.5x improvement in success rates in simulated environments, and it maintains around 80% accuracy when transitioning into real world tasks.
Innovative Grasping with Grasp-MPC
Grasp-MPC introduces an adaptive approach to robotic grasping. By continuously adjusting movements as the robot approaches an object, it improves grasp success from 41% to approximately 75%. This method was developed using two million simulated trajectories of various objects to refine its grasping abilities, demonstrating impressive results in real-world applications.
Advanced Manipulation of Flexible Objects
Another challenge tackled by NVIDIA Research is the Deformable Cluster Manipulation framework. This system allows robots to grasp multiple flexible items simultaneously, excelling in tasks like clearing tangled branches. Using synthetic tree simulations, the robots can interact with real branches without prior practical experience.
Precision in Assembly with SPARR
Achieving perfect assembly is often complex due to real-world variances. The SPARR method enhances robotic assembly by combining a trained policy in simulation with real-time corrections during hardware execution. This approach has improved success rates in assembly tasks significantly, achieving a 38% increase over traditional methods.
Refining Multi-step Assembly with Refinery
For tasks requiring precise sequential steps, the Refinery framework has excelled. By understanding initial conditions, it has achieved nearly 91% success in simulations and significantly improved real-world applications. This method ensures that each assembly step is completed correctly, paving the way for subsequent tasks.
Vision and Action Models that Enhance Performance
The PEEK pipeline improves robot focus by filtering out irrelevant objects in complex scenes, resulting in a 41x improvement in task performance. Additionally, a collaboration with researchers at leading universities led to the development of SEAL, a method that enhances task execution accuracy by 15% in real-time scenarios.
Big Data Initiatives Driving Robotics Forward
NVIDIA is also expanding its resources for robotics research, contributing over 15 million downloads to the NVIDIA Physical AI Dataset, the world’s largest open dataset for physical development. Researchers in institutions like Carnegie Mellon University and MIT are leveraging NVIDIA technologies to bridge the gap between simulation and real-world applications.
As the field continues to evolve, developers can explore NVIDIA’s Isaac Lab and Isaac Sim to embark on their robotics journey, supported by extensive online educational resources.